 0769-87921175
0769-87921175 dglc17@126.com
dglc17@126.com




激光三角测距法作为低成本的激光雷达设计方案,可获得高精度、高性价比的应用
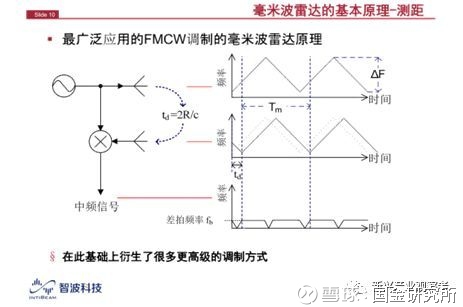
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达
固态激光雷达通常分为哪三种类型?mems固态激光雷达 固态激光雷达是一
激光雷达被比喻为汽车的“眼睛”, 兼具测距远、角度分辨率优、受环境光照影响小等特点,且无需深度学习算法,可直接获得物体的距离和方位信息,与其他传感器互补结合使用可帮助感知系统减小探测误差,因而被
的三维信息,并且具有良好的指向性,抗干扰性强,测距精度高。 直接表现激光雷达系统测距
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达
Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念。
项目名称:基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置试用计划:申请理由本人在嵌入式和电路领域有五年多的学习和开发经验,曾设计过北斗和GPS定位救生装置,对定位系统
、紧急刹车、车距保持等功能。 综述根据上面的介绍进行简单的总结,三种雷达各自的特点及优劣势如下: 制式参数超声波雷达
上一篇: 激光雷达和激光雷达的测距方法与流程
